« Carte IO » : différence entre les versions
Aller à la navigation
Aller à la recherche
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| Ligne 1 : | Ligne 1 : | ||
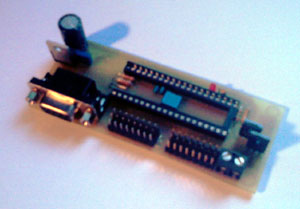
[[Image:Carte-io.jpg|Carte Entrées/Sorties en cours d'assemblage|frame|right]] | [[Image:Carte-io.jpg|Carte Entrées/Sorties en cours d'assemblage|frame|right]] | ||
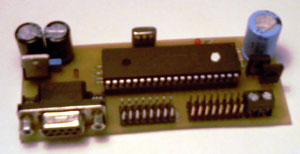
[[Image:Carte-io2.jpg|Carte Entrées/Sorties|frame|right]] | |||
__TOC__ | __TOC__ | ||
Version du 20 juillet 2008 à 17:28

Carte Entrées/Sorties en cours d'assemblage

Carte Entrées/Sorties
Principe Général
La carte a pour but de proposer une solution matérielle polyvalente en matière d'entrées/sorties.
En fonction du logiciel il est ainsi possible d'associer entrées numériques ou analogiques, sorties et servomoteurs.
Le format est (relativement) réduit: 10cm*4cm.
Architecture
Hardware
- La carte est construite autour d'un PIC 18f45xx (à priori 18f4520).
- 16 entrées/sorties entièrement configurables.
- 2 sorties de puissances à collecteurs ouvert.
- une led témoin.
Logiciel
Une utilisation courante de la carte donne les fonctionnalités suivantes :
- 3 sorties servo (64 positions par servo).
- 5 sorties numériques 5v.
- 2 sorties de puissances à collecteurs ouvert.
- 8 entrées numériques.
- Contrôle via i2c
Autre exemple: contrôler 16 servo et 2 sorties de puissances.
Connectique
Connecteur Hub
- Utilisation: Intègre RS232, I2C, Alim selon le standard Pensée Profonde
- Format: DB9
IO 1
- Utilisation : 8 entrées/sorties configurables
- Format: pin header male
- Pinout:
- 1 : masse
- 2 : 5v
- 3 : io
IO 2
- Utilisation : 8 entrées/sorties configurables
- Format: pin header male
- Pinout:
- 1 : masse
- 2 : 5v
- 3 : io
IO 3
- Utilisation: 2 sorties à collecteur ouvert
- Format: bornier à vis 2 fils
- Pinout :
- 1 : sortie 1
- 2 : sortie 2